Research
Robotic systems have the potential to enhance our way of life and solve some of the world’s most difficult problems—but in doing so they encounter situations unanticipated by the robot designer and software developer. Robots need to be equipped with mechanisms that allow them to respond to the unknown reliably to guarantees their success.
We are interested in discovering principles for robots to adapt and learn in real-time through negotiating and responding to their environment. Specifically, our research seeks to analyze and discover principled methods that enable robots to curiously explore, interact, and learn in novel scenarios with minimal data, compute, and with strong performance and reliability guarantees.
Publications
2024
Time-optimal ergodic search: Multiscale coverage in minimum time
The International Journal of Robotics Research
·
08 Oct 2024
·
doi:10.1177/02783649241273597
Scale-Invariant Specifications for Human–Swarm Systems
IEEE Transactions on Field Robotics
·
01 Jan 2024
·
doi:10.55417/fr.2023011
Scale-Invariant Specifications for Human–Swarm Systems
IEEE Transactions on Field Robotics
·
01 Jan 2024
·
doi:10.1109/TFR.2024.3494721
2023
A Pareto-Optimal Local Optimization Framework for Multiobjective Ergodic Search
IEEE Transactions on Robotics
·
01 Oct 2023
·
doi:10.1109/TRO.2023.3284358
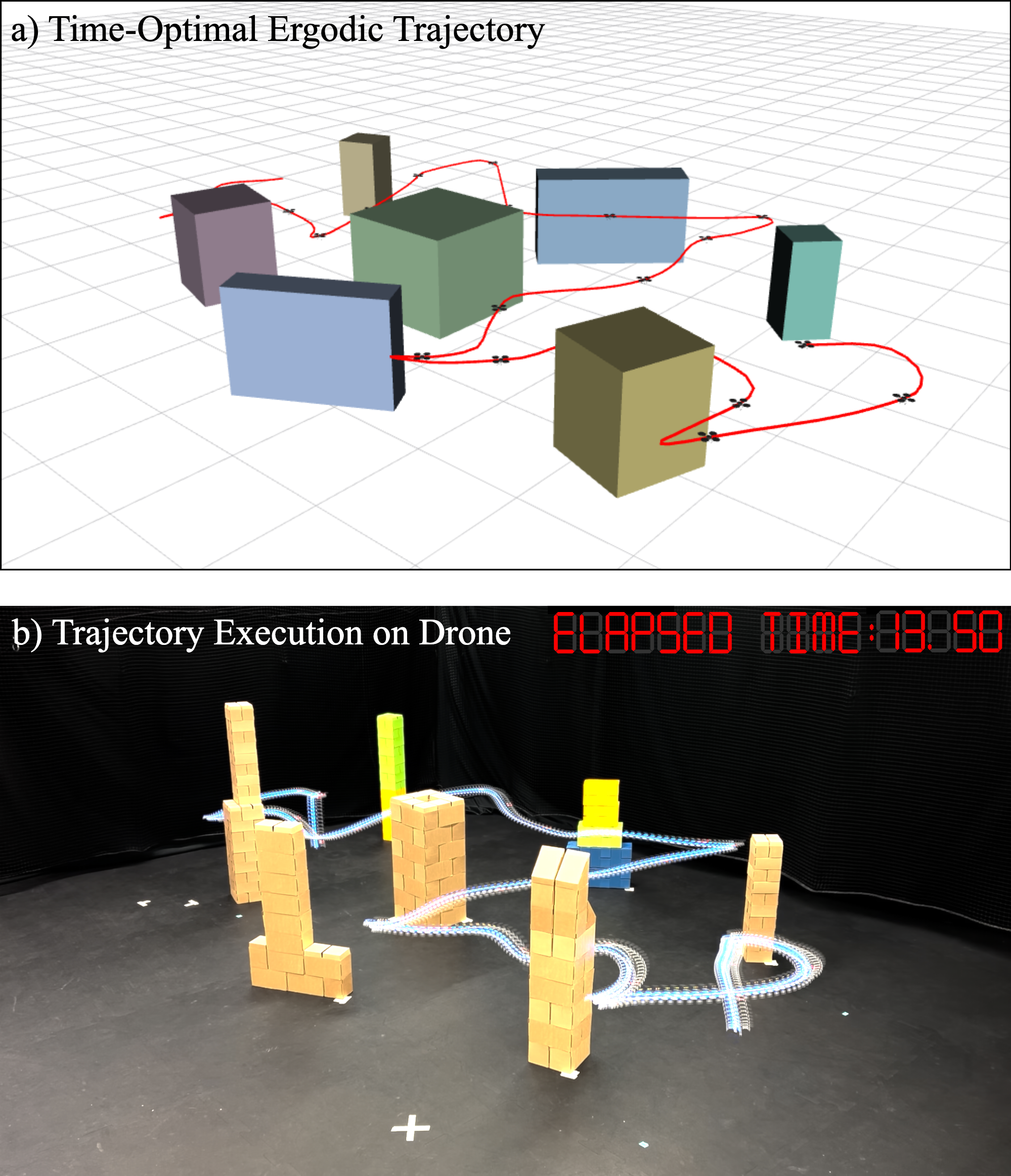
Time Optimal Ergodic Search
Robotics: Science and Systems XIX
·
13 Jul 2023
·
doi:10.15607/RSS.2023.XIX.082
In this paper, we investigate solutions to the time-optimal ergodic search problem for fast and adaptive robotic search and exploration.
Learning Stable Models for Prediction and Control
IEEE Transactions on Robotics
·
01 Jun 2023
·
doi:10.1109/TRO.2022.3228130
2022
Hybrid control for combining model-based and model-free reinforcement learning
The International Journal of Robotics Research
·
02 Jun 2022
·
doi:10.1177/02783649221083331
Learning Cooperative Multi-Agent Policies With Partial Reward Decoupling
IEEE Robotics and Automation Letters
·
01 Apr 2022
·
doi:10.1109/LRA.2021.3135930
2021
An Ergodic Measure for Active Learning From Equilibrium
IEEE Transactions on Automation Science and Engineering
·
01 Jul 2021
·
doi:10.1109/TASE.2020.3043636
2020
Model-Based Generalization Under Parameter Uncertainty Using Path Integral Control
IEEE Robotics and Automation Letters
·
01 Apr 2020
·
doi:10.1109/LRA.2020.2972836
2019
Active Learning of Dynamics for Data-Driven Control Using Koopman Operators
IEEE Transactions on Robotics
·
01 Oct 2019
·
doi:10.1109/TRO.2019.2923880
2018
Decentralized Ergodic Control: Distribution-Driven Sensing and Exploration for Multiagent Systems
IEEE Robotics and Automation Letters
·
01 Oct 2018
·
doi:10.1109/LRA.2018.2849588
Real-Time Area Coverage and Target Localization Using Receding-Horizon Ergodic Exploration
IEEE Transactions on Robotics
·
01 Feb 2018
·
doi:10.1109/TRO.2017.2766265